Модель одноканальной системы ориентации космического аппарата.
Цель работы
Построить модель одноканальной реактивной системы ориентации космического аппарата (КА) в SIMULINK.
Задачи
- Построить модель одноканальной системы ориентации космического аппарата.
- Задать следующие начальные условия \(\varphi_0 = 20^\circ\), \(\dot{\varphi}_0 = 15^\circ/c\).
- Построить фазовый портрет (\(\varphi, \dot{\varphi}\)).
- Построить график изменения угла \(\varphi\) по времени.
- Построить график изменения угловой скорости \(\dot{\varphi}\) по времени.
- Построить график изменения момента, создаваемого двигателями, по времени.
- Построить фазовый портрет системы при \(k_\omega = 0\).
- Построить график изменения угла \(\varphi\) при \(k_\omega = 0\).
- Построить график изменения угловой скорости при \(k_\omega = 0\).
Реактивная система ориентации
В состав системы ориентации КА входят датчик угла, датчик угловой скорости и исполнительные органы. Датчик угла определяет угол между осью \(x_c\), связанной КА, и некоторой осью \(x_0\) фиксированной в пространстве (неподвижная система координат). Датчик угловой скорости определяет угловую скорость КА по отношению к неподвижной системе координат.
Исполнительными органами системы ориентации являются два реактивных двигателя, создающие постоянный момент относительно центра масс КА. Сила \(P_-\) создает отрицательный момент, направленный в сторону уменьшения угла \(\varphi\). Сила \(P_+\) создает положительный момент, направленный в сторону увеличения угла \(\varphi\). Далее будем считать, что \(P_+ = P_- = P\) и плечи этих сил относительно центра масс КА равны (рисунок 1). Система ориентации должна поддерживать угол и угловую скорость КА близкими к нулю.

Рисунок 1 - Работа реактивной системы ориентации
Сигналы, поступающие с датчика угла и угловой скорости, суммируются с заданными коэффициентами: \[s = k_\varphi \phi + k_\omega \dot{\varphi}\]
где \(k_\varphi\) и \(k_\omega\) – коэффициенты усиления угла и угловой скорости.
Итоговый сигнал \(s\) используется для управления включением и выключением двигателей ориентации. Модель функции \(s\) в SIMULINK, выполненная в виде отдельной подсистемы показана на рисунке 2.
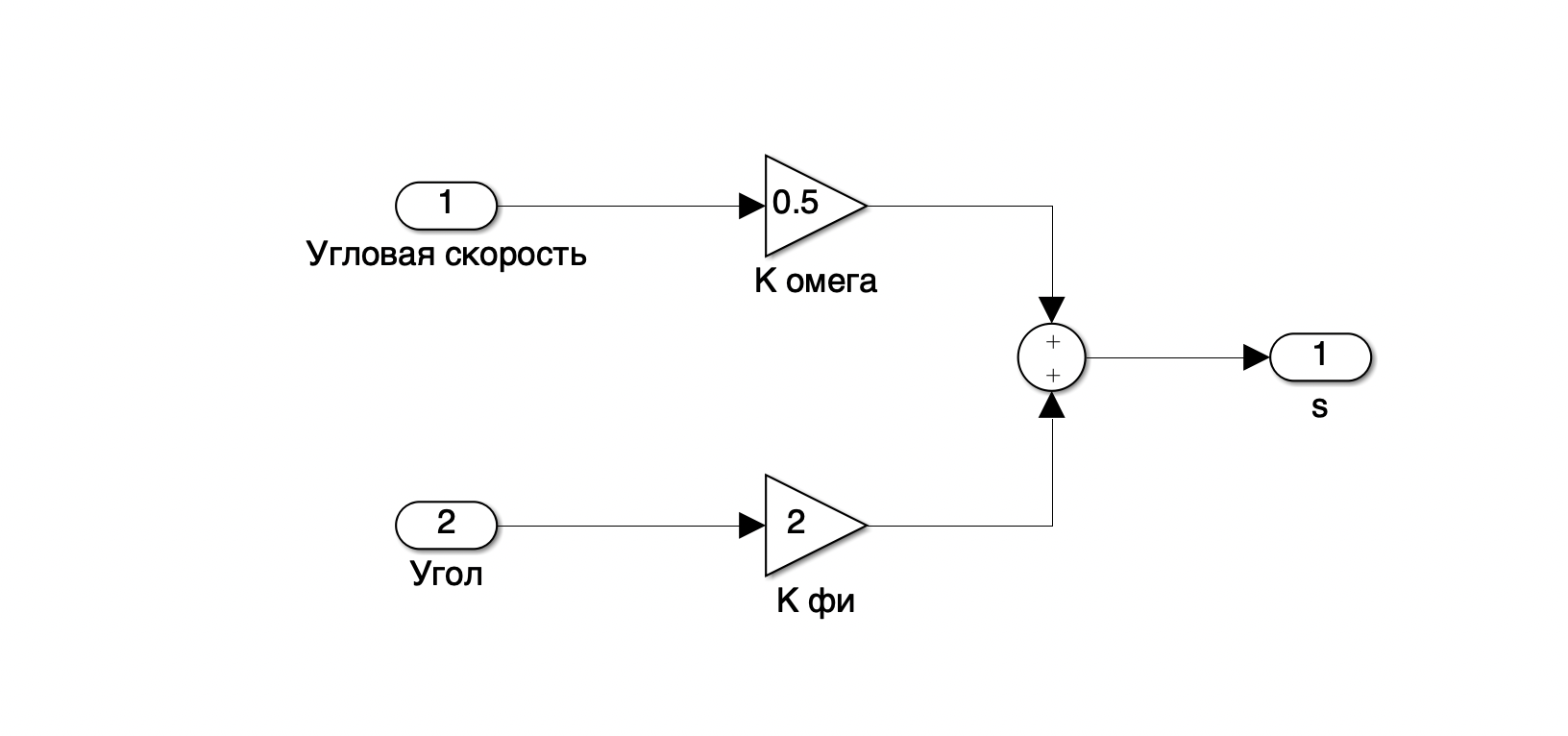
Рисунок 2 - Модель подсистемы “Функция s”
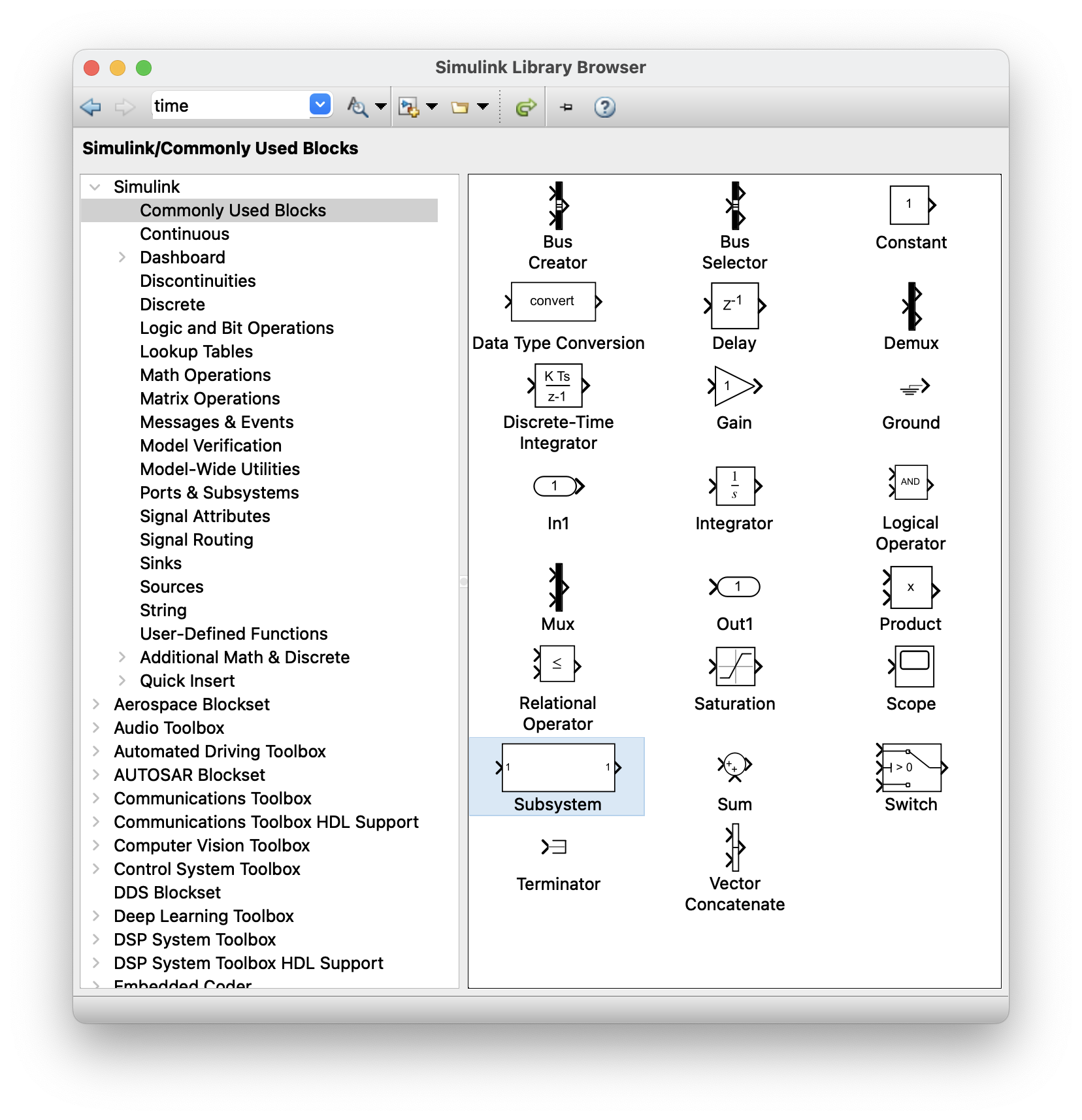
Для создания подсистемы в SIMULINK выберите в разделе “Commonly Used Blocks” блок Subsystem и поместите его в область модели.
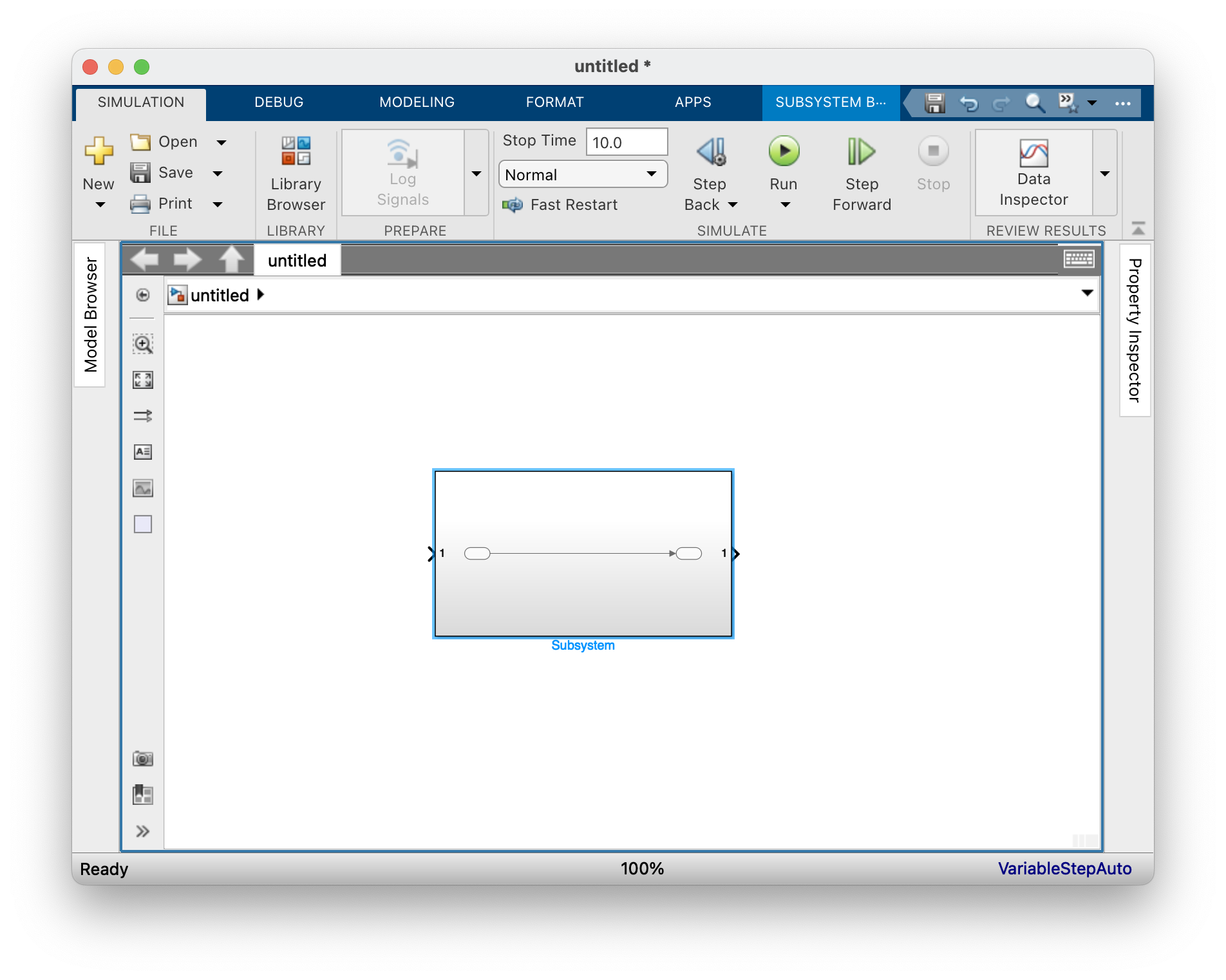
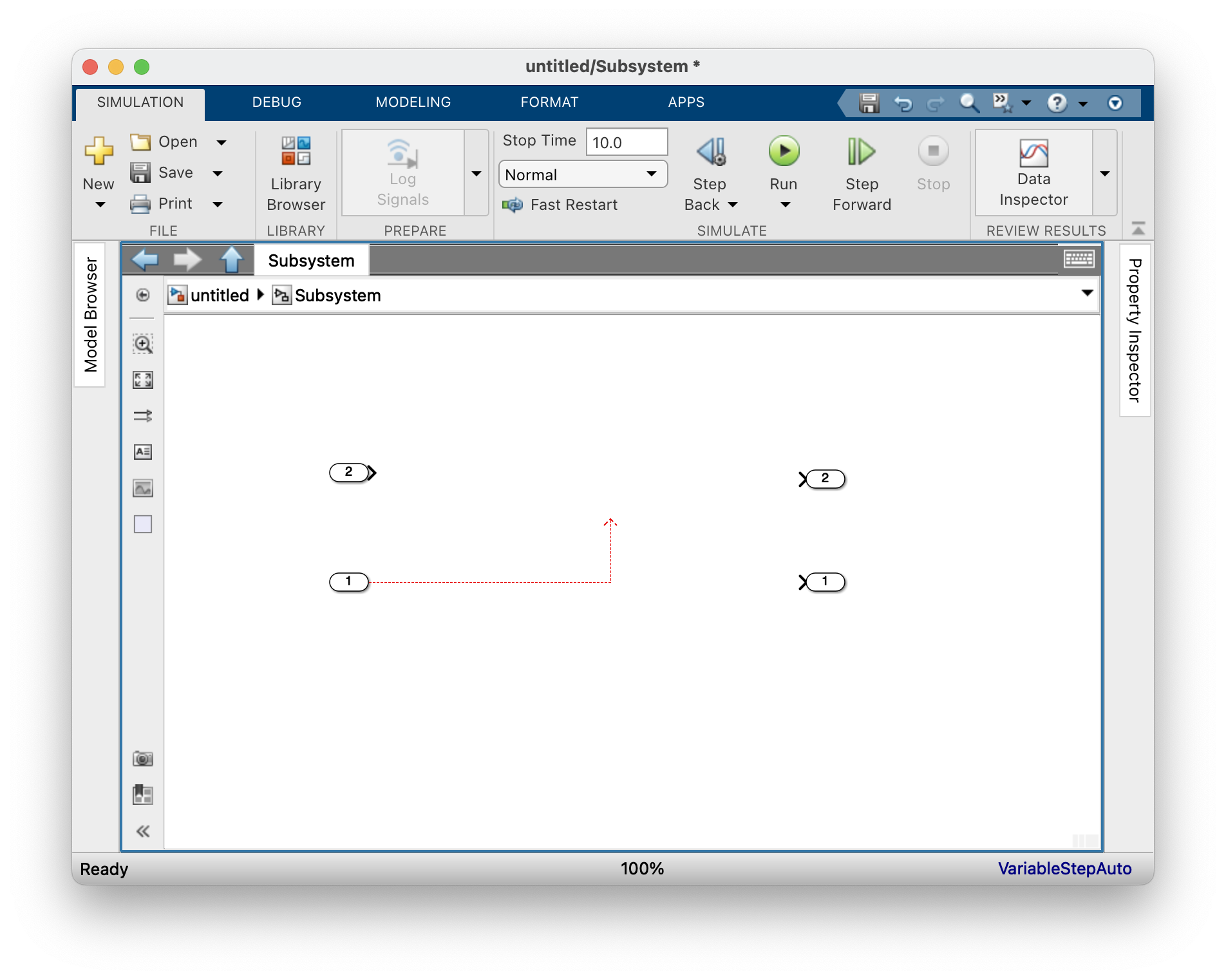
Двойным щелчком мыши перейдите на уровень подсистемы для построения ее модели.
Когда значение функции (сигнала) \(s\) по модулю превышает некоторое пороговое значение \(s_{max}\) происходит включение двигателя. В процессе работы двигатель создает постоянный момент относительно центра масс КА. Знак этого момента зависит от знака величины \(u\): \[u(s) = \begin{cases} +1, & s \geq s_{max} \\ -1, & s \leq -s_{max} \\ 0, & |s| \leq s_{max} \\ \end{cases}\]
Если значение сигнала \(s\) меньше некоторого порогового значения, то функция \(u\) равна нулю, таким образом у рассматриваемой системы ориентации есть зона нечувствительности (\(\mid s\mid \leq s_{max}\)). График функции переключения \(u(s)\) показан на рисунке 3. В общем случае уровень, при котором включается реле может отличаться от уровня, при котором реле отключается. Это явление называется гистерезисом.

Рисунок 3 - Функция управления u(s)
Величина управляющего момента будет определяться выражением \[M = - u(s) \cdot P \cdot h.\]
Модель функции переключения в SIMULINK в виде подсистемы показана на рисунке 4.
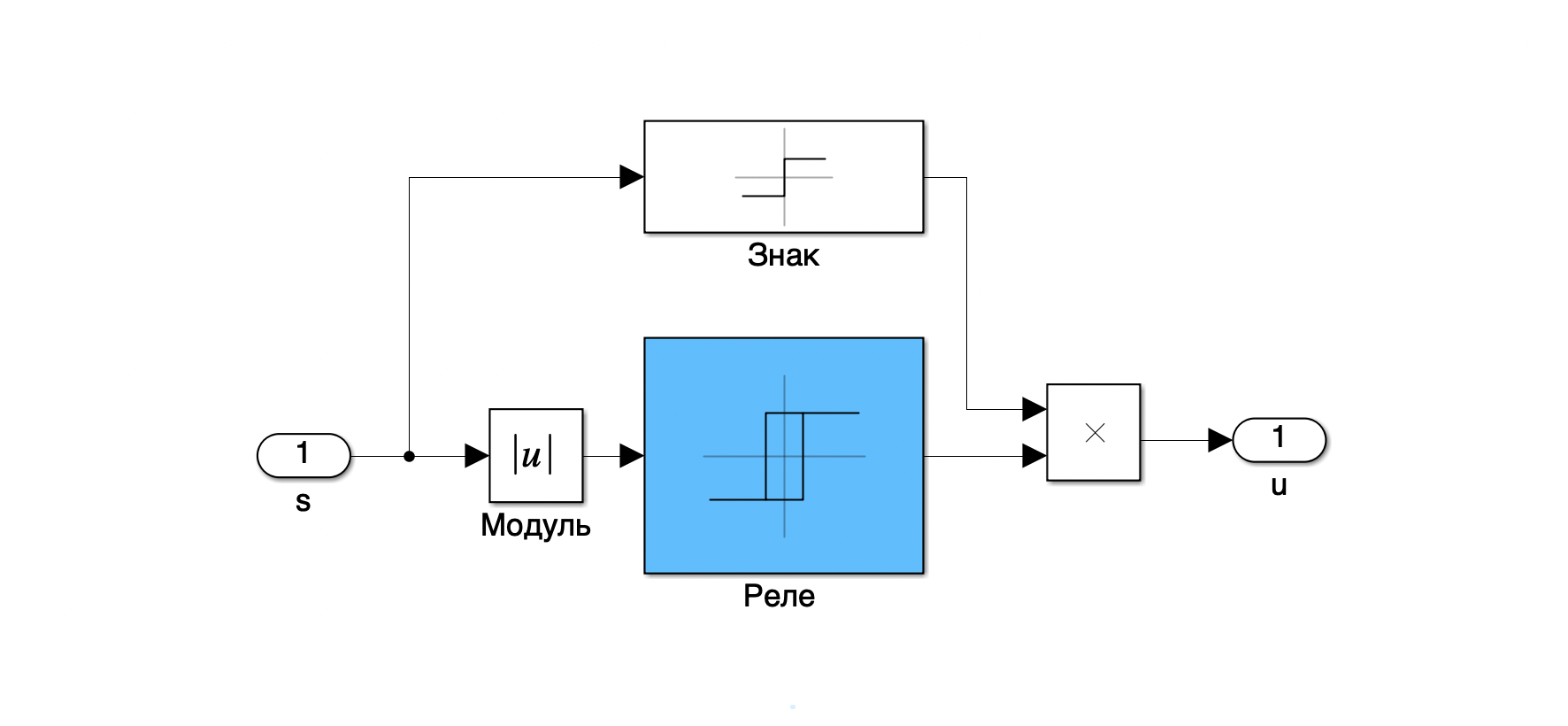
Рисунок 4 - Подсистема “Функция u(s)”
Основой модели является блок “реле”. Настройки блока “Реле” приведены на рисунке 5. Выходной сигнал блока “Реле” равен значению, указанному в поле ввода “Output when on”, если входной сигнал, увеличиваясь, превышает значение “Switch on point”. При уменьшении входного сигнала до уровня ниже “Switch off point” выходной сигнал равен “Output when off”. На вход блока “реле” подается модуль функции u(s). Для учета знака функции u(s) определяется ее знак при помощи блока “Sign” (Знак): +1 или -1, далее это значение умножается на результат работы блока “реле”.
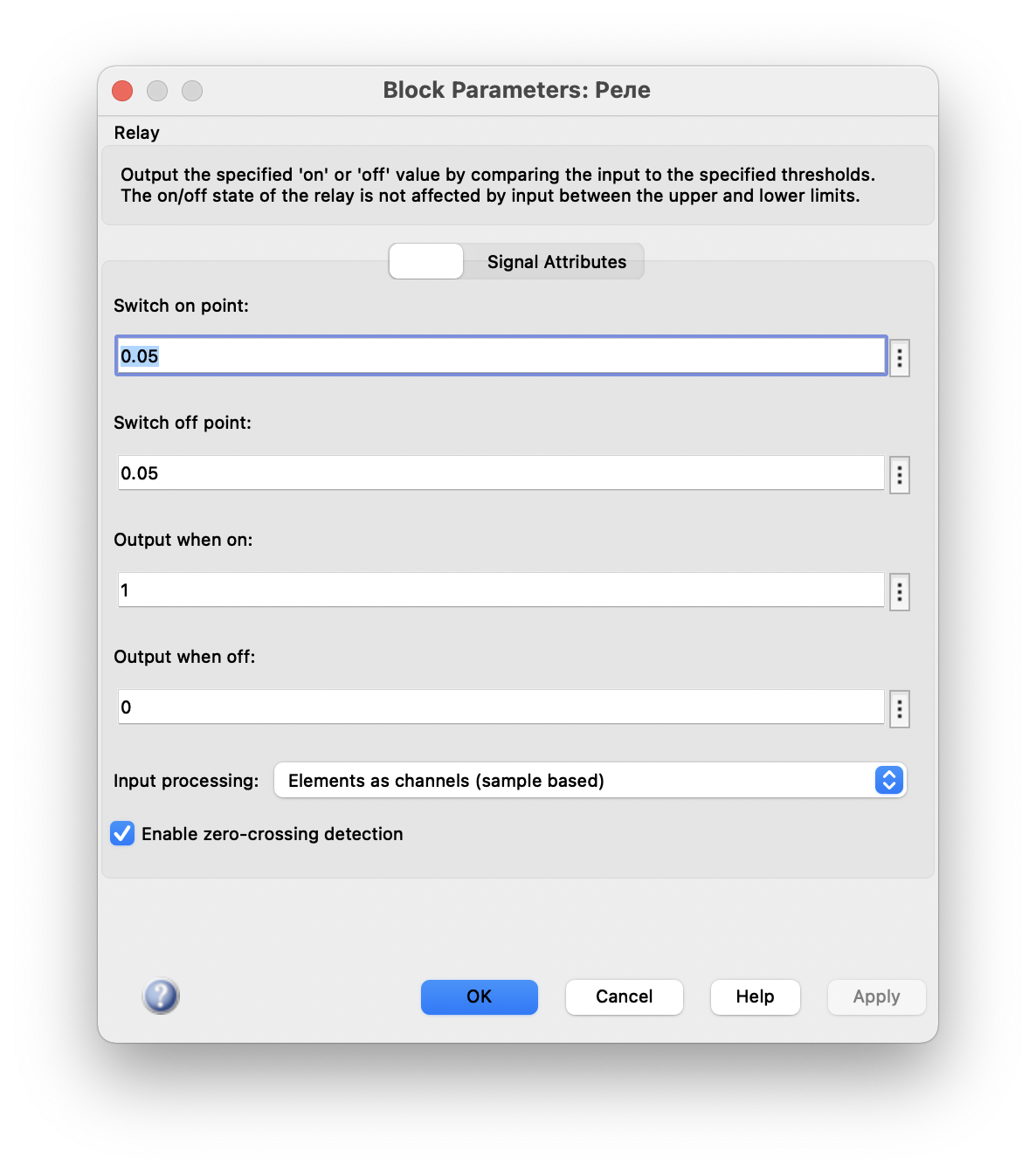
Рисунок 5 - Настройки блока “Реле”
Значение сигнала с выхода подсистемы “Функция u(s)”, который может принимать значения минус 1, 0 или +1 умножается на момент силы тяги. Результат этой операции (момент силы тяги) подается в подсистему, моделирующую динамику КА.
Схема подсистемы, описывающей модель КА, приведена на рисунке 6. На вход подается величина момента, создаваемого двигателями. Момент делится на момент инерции КА относительно центра масс, для этого используется блок “усилитель” (Gain) с коэффициентом усиления 1/J, где J – момент инерции КА. Далее сигнал дважды интегрируется: таким образом интегрируется дифференциальное уравнение движения (вращения) КА в плоскости: \[J \ddot{\varphi} = M(s).\]
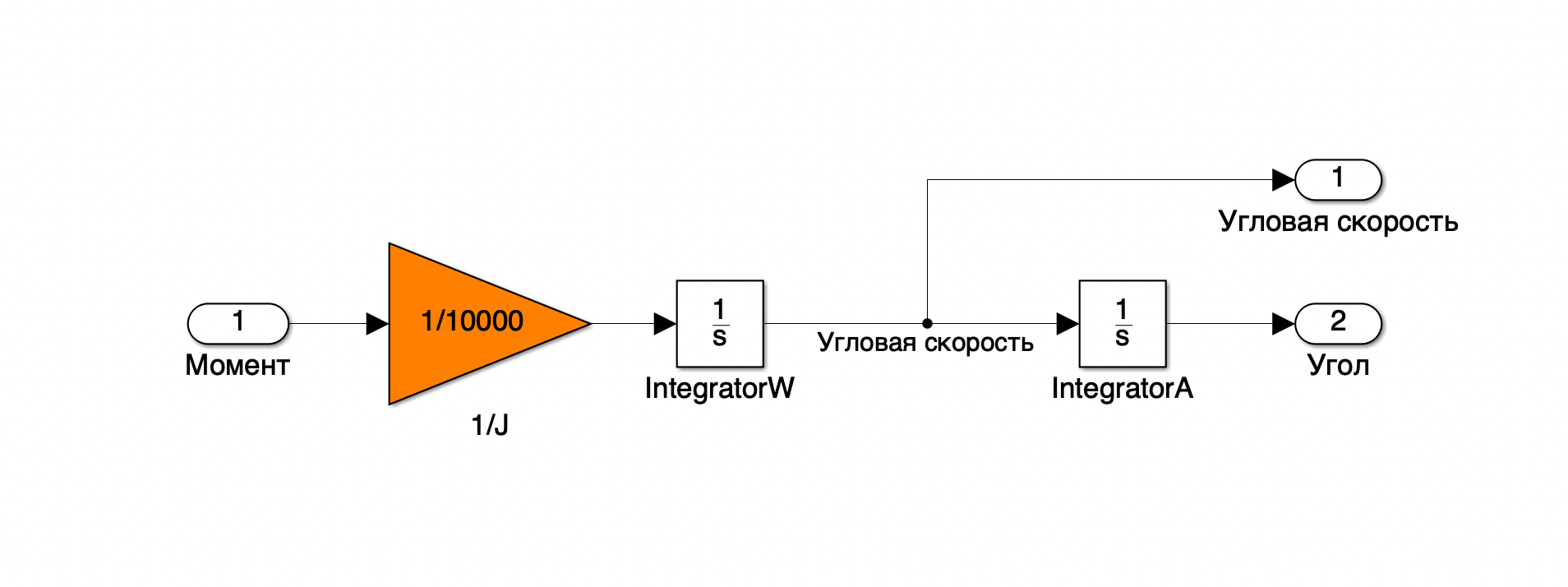
Рисунок 6 - Подсистема “Модель КА”
Общий вид модели показан на рисунке 7.
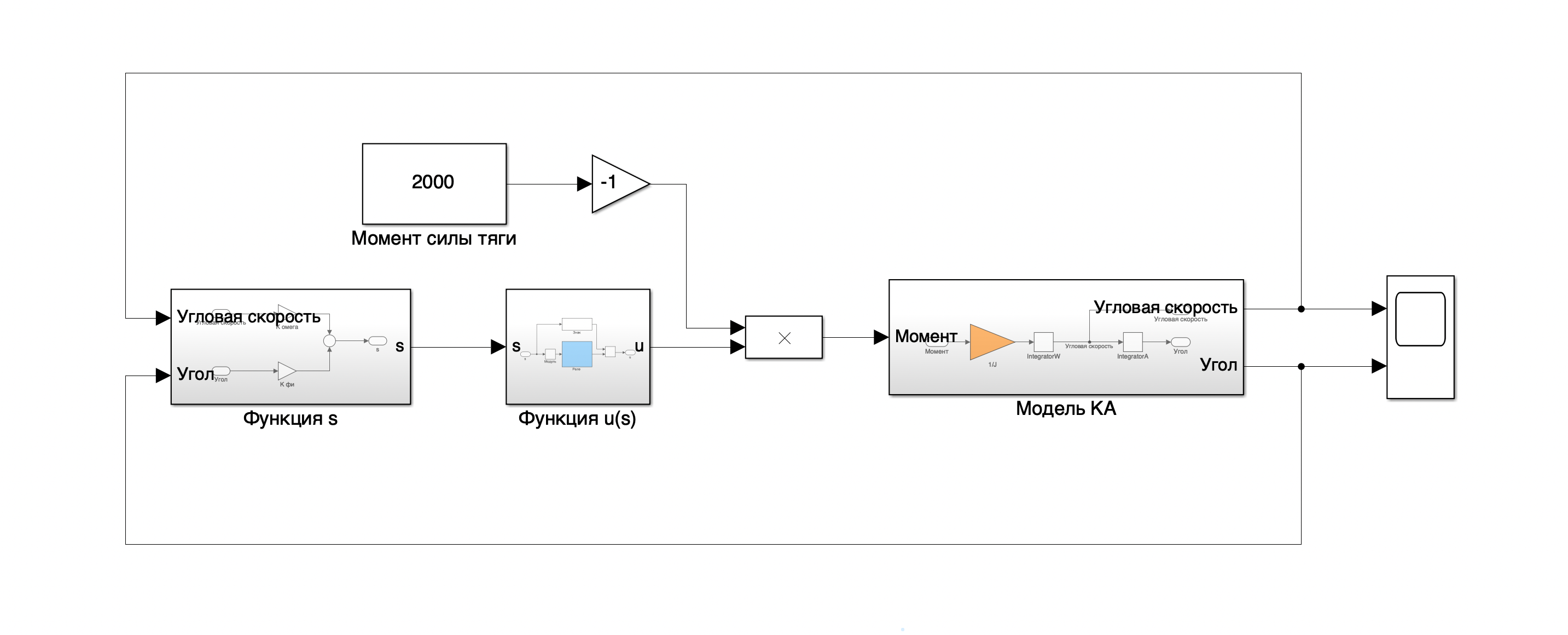
Рисунок 7 - Модель реактивной системы ориентации КА
На рисунке 8 показан пример фазового портрета системы. Фазовый портрет показывает, что каждый последующий цикл колебаний начинается с меньшей угловой скоростью благодаря наклону линий включения и выключения.
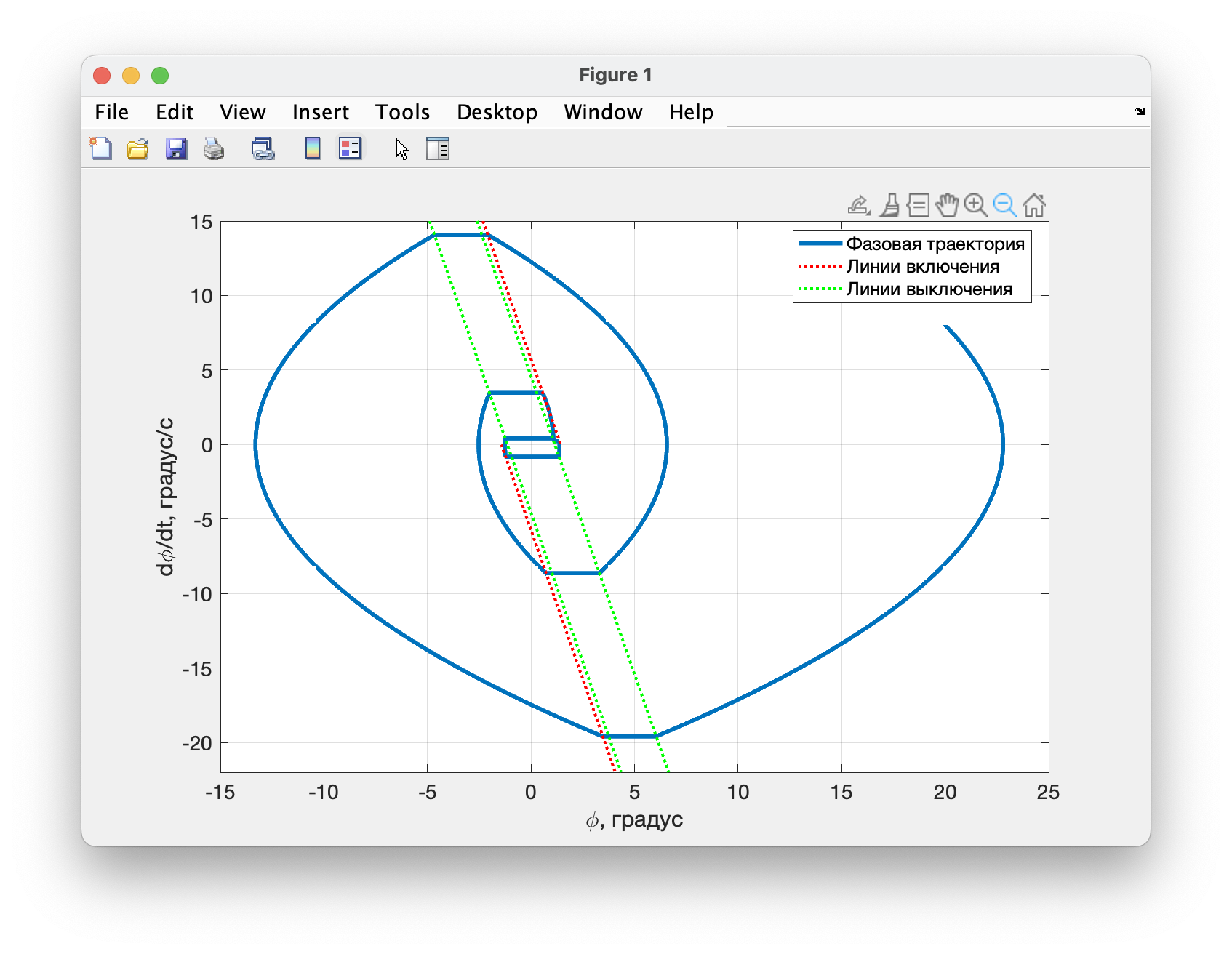
Рисунок 8 - Фазовый портрет
Начиная с некоторой угловой скорости крутизна параболы (траектория, на которой работает двигатель) становится больше наклона линии переключения и фазовая траектория перейдет в траекторию ступенчатого вида. Колебания происходят между линиями включения и выключения. На рисунке 9 в правой части показана одна “ступенька” таких односторонних колебаний. Даже если включение и выключение двигателя происходит при одном и том же уровне сигнала на входе “реле” (гистерезис отсутствует), скользящий режим будет возникать поскольку у реальных двигателей есть минимальная продолжительность работы.
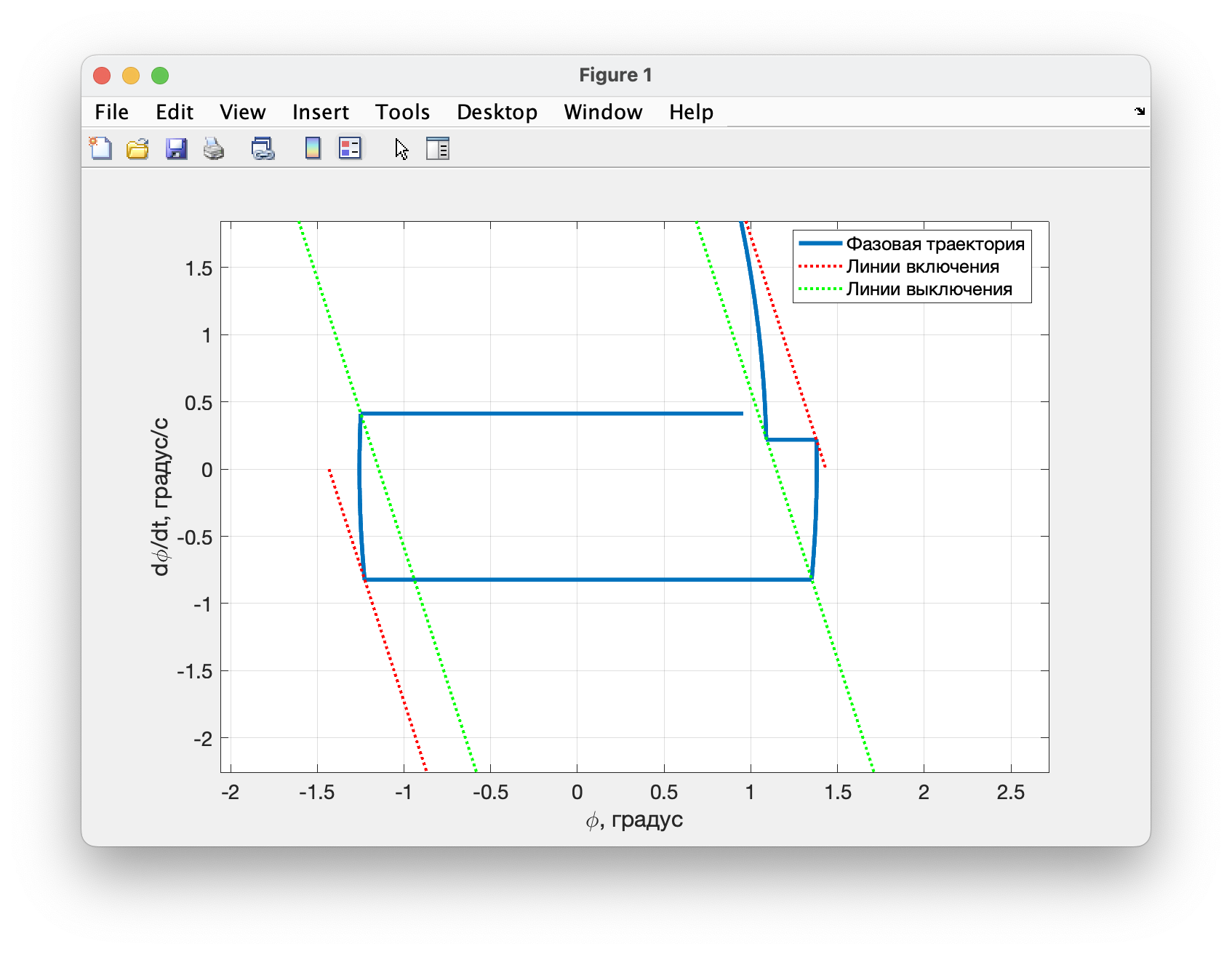
Рисунок 9 - Фазовый портрет
Васильев В.Н. Системы ориентации космических аппаратов / В.Н. Васильев. - М.: ФГУП «НПП ВНИИЭМ», 2009. - 310 с.
