Ортогональные матрицы
Задание для лабораторной работы по курсу Динамика твёрдого тела и систем тел.
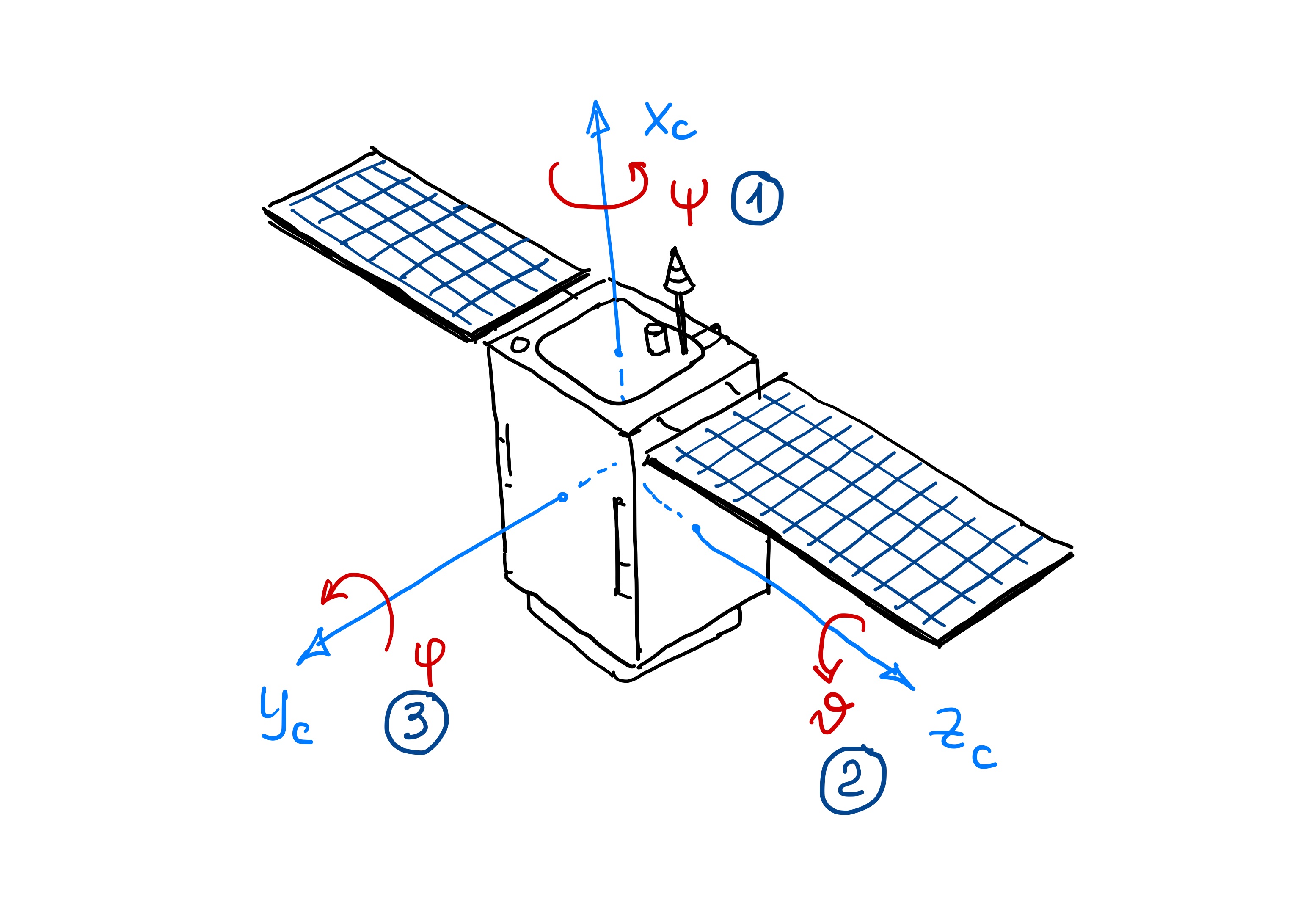
Ориентация системы координат \(C x_c y_c z_x\), связанной с космическим аппаратом по отношению к орбитальной системе координат определяется тремя углами: углом рыскания, углом тангажа и углом крена в указанной последовательности.
Первый разворот на угол рыскания \(\psi\) выполняется вокруг оси \(C x_c\), второй разворот на угол на угол тангажа \(\vartheta\) вокруг оси \(C z_c\), третий поворот на угол собственного вращения \(\varphi\) вокруг оси \(C y_c\). При нулевых значениях углов система координат, связанная с космическим аппаратом, совпадает с орбитальной системой координат.
Задание 1.
Запишите матрицу преобразования координат \(A\) из базиса, связанного с космическим аппаратом в базис орбитальной системы координат \[\mathbf R^{(0)} = \mathbf{A} \mathbf R^{(c)}\]
Задание 2.
В среде MATLAB напишите функцию, которая вычисляет матрицу преобразования координат \(\mathbf A\).
function A = OrientationMatrix(psi, theta, phi)
A = ... ;
end
Задание 3.
Космический аппарат освещается Солнцем, которое находится в положительном направлении оси \(x_o\) орбитальной системы координат. Найдите косинус угла между нормалью к панели солнечной батареи (нормаль к панели совпадает с направлением оси \(Cx_c\)) и направлением на Солнце. Ориентация космического аппарата определяется углами: \[\psi = 90^o\] \[\vartheta = 5 + (\text{NNNNN}\mod 5) \; ^o\] \[\varphi = 10 + (\text{NNNNN}\mod 5) \; ^o\]
где NNNNN - последние пять цифр зачётной книжки.
В отчете должны быть приведены:
- рисунок систем координат (орбитальной и связанной) с указанием углов между осями
- алгоритм построения матрицы преобразования координат
- текст MATLAB-функции (задание 2)
- рисунок к заданию 3, алгоритм определения косинуса угла между нормалью к панели солнечной батареи и направлением на Солнце и найденное значение этого угла.
