Движение твердого тела под действием следящей силы
Задание для лабораторной работы по курсу Динамика твёрдого тела и систем тел.
Построить модель движения орбитальной ступени ракеты-носителя после отделения полезного груза в течение 30 секунд. Принять допущение о том, что орбитальная ступень движется только под действием силы тяги сопла торможения относительно орбитальной подвижной системы координат, которая считается инерциальной (ИСК).
Описание механической системы
- Схема орбитальной ступени показана на рисунке 1.
 Рисунок 1 – Схема ступени (все линейные размеры в миллиметрах)
Рисунок 1 – Схема ступени (все линейные размеры в миллиметрах)
- Инерционно-массовые характеристики ступени
| Параметр | Значение |
|---|---|
| Масса ступени | 5000 кг |
| Положение центра масс, \(x_c\) | 3 м |
| Момент инерции относительно продольной оси | 5000 кг\(\cdot\)м \(^2\) |
| Момент инерции относительно любой поперечной оси | 20000 кг\(\cdot\)м \(^2\) |
- Тяга реактивного сопла увода
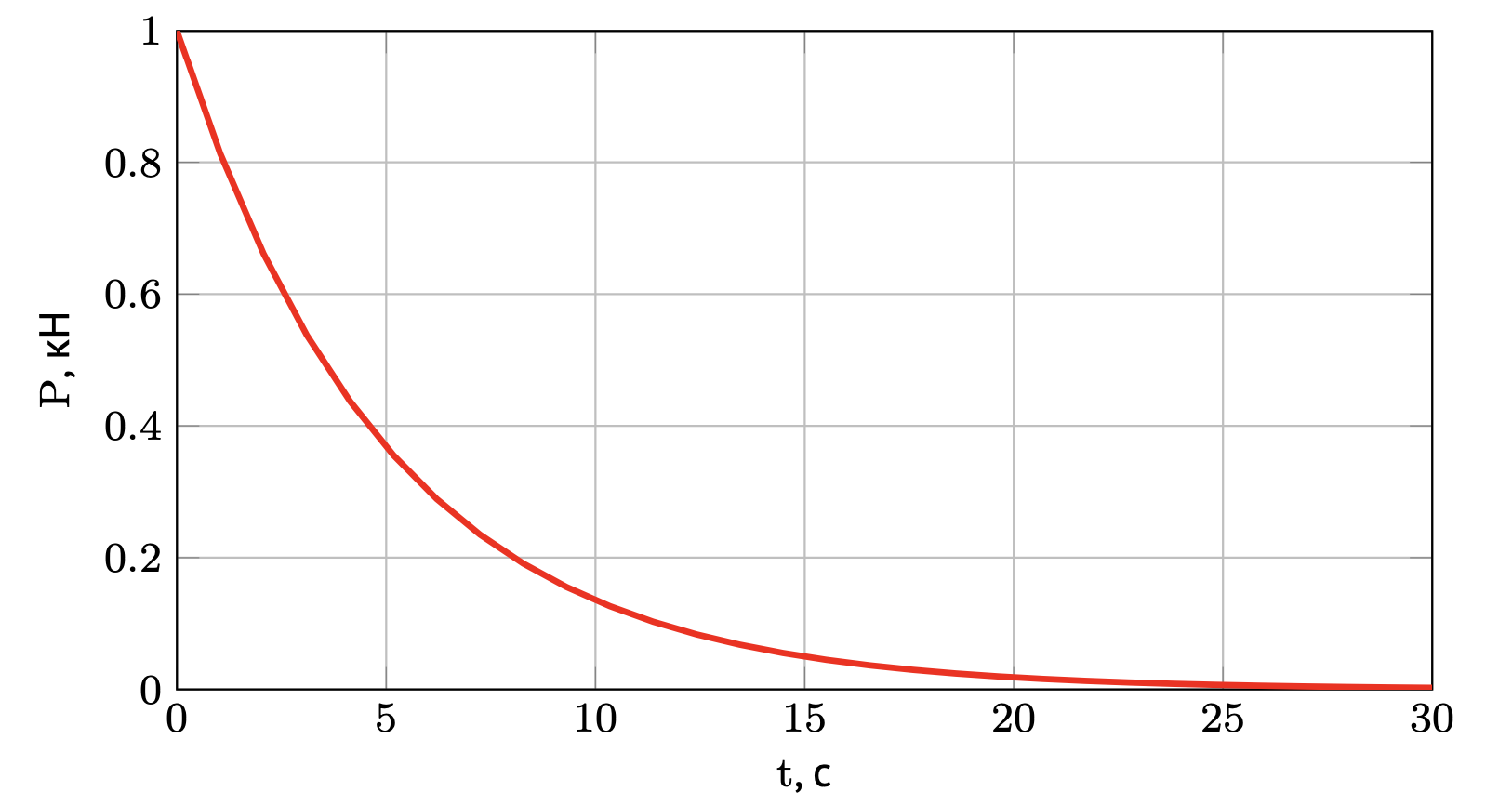 Рисунок 2 – Закон изменения тяги реактивного сопла
Рисунок 2 – Закон изменения тяги реактивного сопла
В качестве параметров, определяющих угловое положение ступени – связанной со ступенью системы координат (ССК) – относительно ИСК, использовать:
- направляющие косинусы;
- углы Эйлера (пассивная точка зрения);
- кватернионы.
Последовательность поворотов углов Эйлера выбирается из следующей таблицы:
| Вариант | Последовательность |
|---|---|
| 1 | 313 |
| 2 | 231 |
| 3 | 131 |
Номер варианта определяется по формуле 1 + (NNNNN mod 3), где NNNNN - последние пять цифр номера зачетной книжки. В начальный момент времени координаты центра масс равны нулю, скорость ступени равна нулю (по отношению к орбитальной подвижной системы координат). Начальные углы поворота определяются выражением: \[\varphi_1 = 1 + (\text{NNNNN} \mod 5), \; \varphi_1 = 5 + (\text{NNNNN} \mod 10), \; \varphi_1 = 10 + (\text{NNNNN} \mod 5).\]
Проекция начальной угловой скорости ступени на ее продольную ось равна 1 градус в секунду, проекции угловой скорости на поперечные оси равны нулю.
Задание
Часть 1
- Записать уравнения движения центра масс, вокруг центра масс и кинематические уравнения движения, используя в качестве параметров углы (313, 231 или 131), направляющие косинусы и кватернионы.
- Разработать программу моделирования движения ступени на интервале работы сопла увода для трех вариантов уравнений движения (в среде MATLAB или Octave).
- Построить графики изменения проекций угловой скорости ступени на связанные оси: \(\omega_x, \omega_y, \omega_z\) (для одного варианта программы).
- Построить графики изменения координат и проекций скорости центра масс ступени на оси орбитальной подвижной системы координат: \(x,y,z\), \(V_x, V_y, V_z\) для каждого варианта программы (результаты должны совпадать).
- Построить графики изменения углов: \(\varphi_1, \varphi_2, \varphi_3\).
Часть 2
- Определить проекции единичного вектора направление вектора кинетического момента ступени после окончания работы реактивного сопла (через 30 секунд после начала движения) в системе координат \(O x_0 y_0 z_0\).
- Определить угол нутации и угловую скорость прецессии орбитальной ступени после окончания работы реактивного сопла (через 30 секунд после начала движения).
Часть 3
- Записать аналитические выражения для проекций угловой скорости ступени на собственные оси на интервале от 30 до 50 секунды (движение “по инерции”), определить законы изменения проекций угловой скорости, построить графики.
- Сравнить численное решение на том же интервале с аналитическим (построить графики).
