Раскрытие посадочной опоры многоразовой ступени РН Falcon-9
Model of the free opening of the landing gear of the Falcon-9 reusable launch vehicle.
Рассмотрим процесс свободного раскрытия посадочной опоры многоразовой первой ступени РН Falcon-9. Возвращаемая ступень имеет четыре одинаковые посадочные опоры. Опоры раскрываются до касания поверхности земли в процессе работы двигателя торможения. Движение посадочной опоры при раскрытии рассматривается по отношению к корпусу возвращаемой ступени, т.е. по отношению к неинерциальной системе координат движущейся с известным ускорением под действием силы тяги двигателя и силы тяжести. Действие других сил на движение опоры не рассматривается.

Рисунок 1 - Посадочная опора возвращаемой ступени РН Falcon-9 в раскрытом положении
Посадочную опору представим в виде двух однородных стержней, которые назовем опорный подкос и демпфирующий подкос. Опорный подкос имеет постоянную длину \(OB = l\). Демпфирующий подкос представляет собой телескопическую конструкцию и его длина \(AB = s\) при раскрытии опоры увеличивается. В первом приближении будем считать, что масса подкоса равномерно распределена по длине. Для анализа процесса раскрытия посадочной опоры используется упрощенная модель, схема которой показана на рисунке 2. Подкос OB представлен однородным стержнем с массой \(m_{OB}=m\), демпфирующий подкос \(AB = s\) представлен однородным стержнем переменной длины AB и массой \(m_{AB}\).

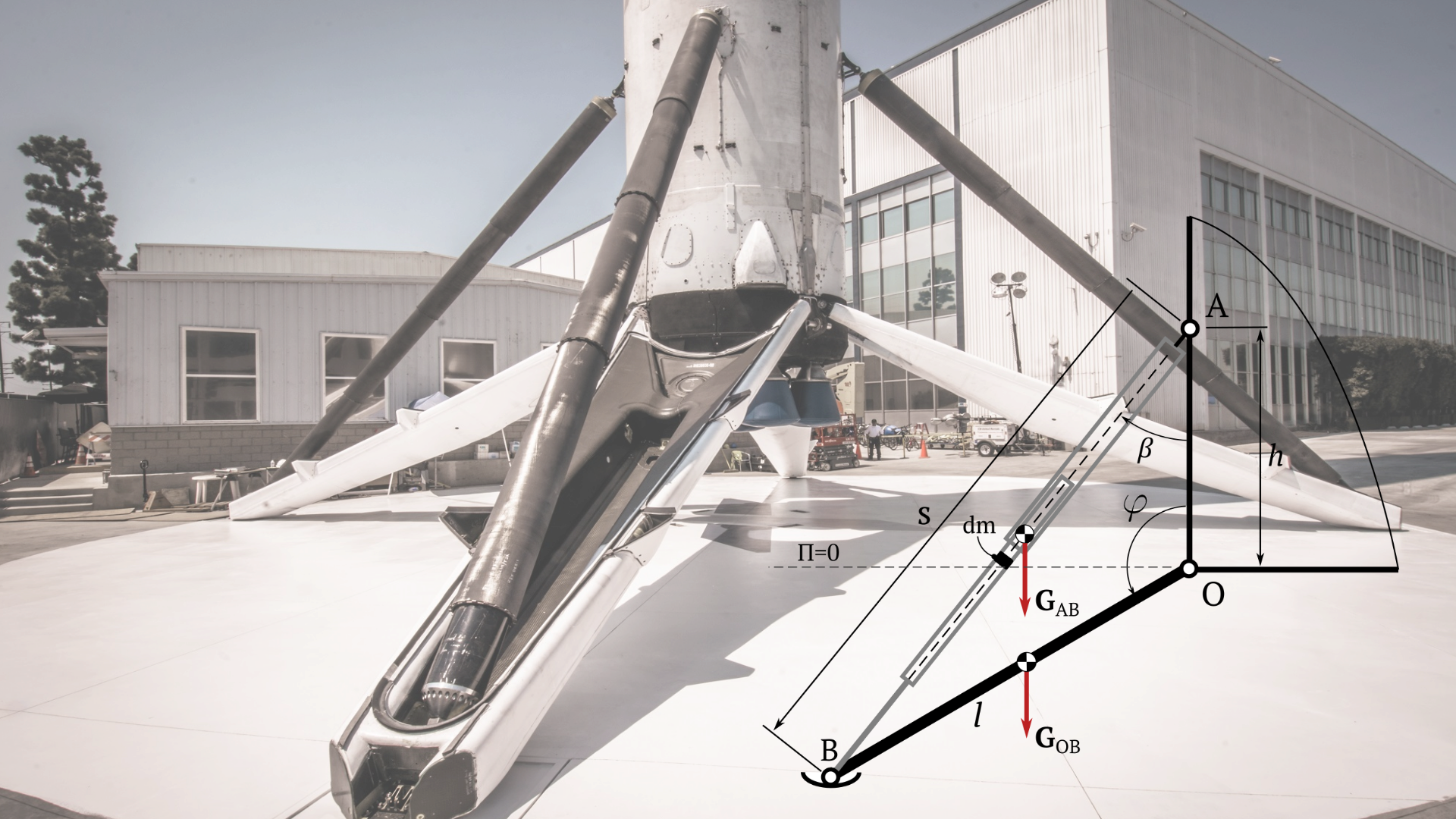
Рисунок 2 - Схема посадочной опоры
В процессе раскрытия опоры возвращаемая ступень движется поступательно с известной вертикальной перегрузкой, определяемой работой двигателя торможения.
Уравнения движения
Для записи уравнений движения посадочной опоры используем формализм Лагранжа. Рассматриваемый механизм имеет одну степень свободы и его положение однозначно определяется углом поворота опорного подкоса относительно корпуса возвращаемой ступени \(\varphi\). Уравнение Лагранжа второго рода имеет вид \[\frac{d}{dt} \frac{\partial T}{\partial \dot \varphi} - \frac{\partial T}{\partial \varphi} = Q_\varphi\]
где T – кинетическая энергия системы, \(Q_\varphi\) – обобщенная сила.
Кинетическая энергия системы
Кинетическая энергия системы \(T\) представляет собой кинетическую энергию движения посадочной опоры относительно корпуса. Эта кинетическая энергия будет складываться из кинетических энергий двух звеньев АВ и ОВ: \[T = T_{AB} + T_{OB}\]
Как было отмечено выше, подкос OB представлен однородным стержнем с массой \(m_{OB}=m\), а демпфирующий подкос AB представлен однородным стержнем переменной длины \(AB=s(t)\) и массой \(m_{AB}\). Кинетическая энергия демпфирующего подкоса определяется с учётом изменения его длины при развороте. Масса демпфирующего подкоса постоянна и равна \[m_{AB}=k m,\]
где коэффициент k представляет собой отношение массы подкоса АВ к массе подкоса ОВ. Длина s демпфирующего подкоса АВ есть функция угла поворота \(\varphi\), который зависит от времени. Для определения кинетической энергии рассмотрим бесконечно-малый элемент этого стержня, который имеет массу \(dm\). Эту элементарную массу можно представить как произведение погонной массы стержня \(\mu\) на бесконечно-малый участок длины \(dm = \mu ds\) . Погонную массу стержня \(\mu\) определим как отношению его полной массы \(m_{AB}\) к текущей длине, которую обозначим как s: \[dm = \mu ds=k m/s ds.\]
Элементарная масса \(dm\) совершает сложное движение. Во-первых, она поворачивается, вместе со стержнем вокруг оси А. Назовём эту скорость трансверсальной скоростью \(v_\tau\). Во-вторых, масса \(dm\) движется вдоль стержня вследствие изменения его длины. Это будет радиальная скорость \(v_r\) (рисунок 3).
Сделаем еще одно допущение о том, что радиальные скорости точек стержня увеличиваются от точки А к точке В линейно от нуля (скорость точки А), до \(V_B= \dot s\). Скорость точки, находящейся на расстоянии \(\xi\) от точки А, будет равна \[v_r= \frac{\xi}{s} \dot s\]

Рисунок 3 - К определению кинетической энергии демпфирующего подкоса
Касательная скорость точки также зависит от расстояния до оси вращения А и от угловой скорости вращения стержня АВ: \[v_\tau = \xi \dot \beta\]
где \(\beta\) – угол поворота стержня АВ относительно корпуса. Полная скорость массы \(dm\) определяется выражением: \[v_{dm}=\sqrt{v_\tau^2+v_r^2}=\sqrt{\frac{ξ^2}{s^2}\dot{s}^2+ξ^2 \dot{\beta}^2}\]
Кинетическую энергию демпфирующего подкоса определим как: \[T_{AB} = \int_0^s \frac{v_{dm}^2}{2}\frac{km}{s} = \frac{1}{2} \int_0^s (\xi^2 \dot \beta^2 +\frac{\xi^2}{s^2} \dot s^2) \frac{km}{s} d \xi = \frac{1}{6} (s^2 \dot \beta ^2 + \dot s^2 ) m_{AB}.\]
Угол поворота стержня АВ \(\beta\) будет определяться выражением: \[\cos \beta = \frac{h^2 + s^2 - l^2}{2sh}\]
а длина \(s\) выражением \[s^2 = l^2 + h^2 - 2 l h \cos \varphi\]
Представим расстояние между шарнирами \(h\) как \(h= \zeta l\), где \(\zeta\) некоторая безразмерная величина \(0 < \zeta < 1\). С учетом этой замены, выражение для угла \(\beta\) и длины \(s\) примут вид: \[\cos \beta = \frac{\zeta - \cos \varphi}{\eta}, \quad s = \eta l\]
где \(\eta^2 = 1 + \zeta^2 - 2 \zeta \cos \varphi\)
Продифференцировав последние выражения, получим угловую скорость демпфирующего подкоса и скорость его удлинения \[\dot \beta = \frac{\eta \cos \varphi-1}{\eta^2} \dot \varphi, \quad \dot s = l \frac{\zeta}{\eta} \dot \varphi \sin \varphi\]
Кинетическая энергия посадочной опоры примет вид: \[T = \frac{1}{6} (s^2 \dot \beta ^2 + \dot s^2 ) m + \frac{J_{OB} \dot \varphi^2}{2}\]
Подставим в это выражение полученные выше выражения для \(\dot beta\) ̇и \(\dot s\), получим: \[T = \frac{1}{6} m_{AB} l^2 \dot \varphi^2 + \frac{J_{OB} \dot \varphi^2}{2}\]
С учетом соотношения масс \(m_{AB}=km\): \[T = \frac{1}{6} (1+k) m l^2 \dot \varphi^2\]
Обобщенная сила
Поскольку движение посадочной опоры рассматривается относительно системы координат, связанной с корпусом возвращаемой ступени, которая движется в поле силы тяжести под действием силы тяги двигателя, на посадочные опоры будут действовать переносные силы инерции \(G_{OB}\) и \(G_{AB}\). При постоянной силе тяги обобщенные силы можно определить, используя выражение для потенциальной энергии посадочной опоры: \[\Pi = \Pi_{OB}+\Pi_{AB} = m_{OB} g n_x \frac{l_{OB}}{2} \cos \varphi + m_{AB} g n_x \left[ h+\frac{s}{2} \cos (\pi - \beta) \right]\]
где \(n_x\) – перегрузка возвращаемой ступени, вызванная работой двигателя торможения. За нулевой уровень потенциальной энергии принята поперечная плоскость возвращаемой ступени, проходящая через точку О. Для известного выражения потенциальной энергии, обобщенная сила будет определяться выражением: \[Q_\varphi = - \frac{\partial \Pi}{\partial \varphi} = - \frac{1}{2} g (k+1) l m n_x \sin \varphi\]
Уравнение движения
При принятых допущениях, если движение системы происходит только под действием переносной силы инерции, уравнение движения посадочной работы имеет вид уравнения нелинейного математического маятника и не зависит от масс элементов, а определяется только длиной опорного подкоса и перегрузкой возвращаемой ступени: \[\ddot \varphi = \frac{3}{2l} g n_x \sin \varphi\]
Это уравнение интегрируется с начальными условиями \(\varphi(0) = 0\), \(\dot{\varphi}(0) = \omega_0\).
Задание
- Определите угловую скорость опорного подкоса при раскрытии посадочной опоры при следующий параметрах посадочной опоры и начальных условиях:
- масса опорного подкоса \(m_{AB} = 250\) кг;
- масса телескопического подкоса \(m_{ОB} = 150\) кг;
- длина опорного подкоса \(l =\) м;
- начальная длина телескопического подкоса \(s_0 =\) м;
- конечный угол поворота опорного подкоса \(\varphi_k = 120^o\);
- начальная угловая скорость подкоса \(\dot \varphi(0) = 10^o/c\) (при \(\varphi_0 = 0\));
- перегрузка \(n_x = 1\).
- Определите максимальную силу растяжения телескопического подкоса после раскрытия опоры: считая, что в момент полного раскрытия опоры он имеет жесткость на растяжение \(c = 10^5\) Н/м.

