Модель системы обезвешивания в SimInTech
Модель в среде SimInTech наземной экспериментальной установки для отработки процесса отделения переходного отсека от орбитального блока.
Для подтверждения работоспособности механизмов подвижных элементов конструкций космических аппаратов (раскрываемых солнечных батарей, антенн), средств разделения элементов конструкций ракет-носителей (отработавших ускорителей, створок головных обтекателей, хвостовых отсеков) обычно не ограничиваются только математическим и компьютерным моделированием, а используют и экспериментальные методы. Например, для экспериментальной отработки системы раскрытия солнечных батарей КА строят сложные многозвеньевые механические системы для компенсации действия на створки солнечной батареи сил веса, имитируя, конечно с погрешностями, в земных условия условия невесомости. Ниже на фото показана подобная система обезвешивания панели солнечной батареи, состоящей из 5 створок. На фото видны тросы, на которых подвешены створки, прикрепленные к подвижным поперечным балкам, которые могут двигаться с небольшим сопротивлением по направляющим.

Рисунок 1 - Система обезвешивания створок солнечных батарей КА
Перед разработчиком экспериментальной установки стоит задача выбора параметров системы обезвешивания, например длин и жесткостей тросов, и оценки влияния системы обезвешивания на движение отрабатываемой механической системы, чтобы можно было сопоставить результаты испытаний с ожидаемым (расчётным) движением в условиях полета и сделать вывод об успешности прохождения этапа наземной отработки отрабатываемой системы. Очевидно, что модель движения отрабатываемой системы в условиях наземной отработки является более сложной, чем модель исходной системы.
Отделение переходного отсека
Рассмотрим для примера модель отделения переходного неразрезного отсека орбитального блока. Схема отделения отсека описана в патенте “УСТРОЙСТВО ДЛЯ ОТДЕЛЕНИЯ ПЕРЕХОДНОГО ОТСЕКА ОТ КОСМИЧЕСКОГО ОБЪЕКТА (RU 2 200 117 C1)”. Отсек отделяется от орбитального блока без разделения на створки, подобно створкам головного обтекателя ракеты-носителя (поэтому его и “прозвали” неразрезной отсек), а съезжает по роликам, установленным на орбитальном блоке. На самом отсеке установлены направляющие, по которым катятся ролики. Такая схема позволяет снизить массу отсека в сравнении с отсеком разделяемым на створки за счёт исключения из конструкции продольных стыков.
Начальную скорость движения отсека относительно орбитального блока после разделения поперечного стыка отсека с орбитальным блоком обеспечивают пружинные толкатели (рисунок 2).

Рисунок 2 - Отделяемый переходный отсек орбитального блока
При проведении экспериментальной отработки может быть необходимо подтвердить скорость движения отсека относительно орбитального блока, отсутствие “зацепов” отсека за конструкцию орбитального блока (его макета). Если рассматривать только относительное поступательное движение переходного отсека и орбитального блока, то относительную скорость можно определить из закона об изменении кинетической энергии: \[\Delta V = V_2 - V_1 = \sqrt{\frac{2A}{m^*}}\]
где \(A\) - суммарная работа толкателей отделения, \(m^*\) - приведенная масса определяемая выражением: \[m^* = \frac{m_{OB} m_{A}}{m_{OB}+m_A}\]
где \(m_{OB}\) – масса орбитального блока, \(m_A\) – масса отделяемого отсека.
Для наземной отработки процесса отделения неразрезного переходного отсека в книге “Расчёт и проектирование систем разделения ступеней ракет” рекомендуется использовать вертикальную схему обезвешивания, показанную на рисунке 3.

Рисунок 3 - Схема экспериментальной установки (рисунок из книги “К. С. Колесников, В. В. Кокушкин, С. В. Борзых, Н. В. Панкова Расчёт и проектирование систем разделения ступеней ракет. М.: МГТУ им. Н.Э. Баумана. 2006.”)
Отсек 7 подвешивается в кардановом подвесе при помощи блочно-тросовой системы 2. Вес отсека компенсируется при помощи противовеса 13, масса которого равна массе отсека, массе траверсы 4 и других элементов подвески.
Очевидно, что в этой схеме под действием толкателей отделения 8 после разделения поперечного стыка 9 будет двигаться и отсек и траверса и противовес, т.е. масса минимум в два раза превышающая массу самого отсека, поэтому скорость движения отсека относительно макета орбитального блока 6 (\(\Delta V^{исп}\)) после окончания работы толкателей 8 будет меньше скорости отсека в условиях полета \(\Delta V\): \[\Delta V^{исп} < \sqrt{\frac{2A}{2 m^*}} = \frac{\Delta V}{\sqrt{2}}\]
Для того чтобы в условиях наземной отработки добиться той же скоростей движения переходного отсека необходимо компенсировать увеличение массы. Для этого используется дополнительный комплект толкателей противовеса 12 (рисунок 3). Удвоив работу толкателей в системе, можно компенсировать удвоение подвижной массы экспериментальной установки: \[\Delta V^{исп} = \sqrt{\frac{2\cdot (2 A)}{2 m^*}} = \Delta V\]
Добавление в систему дополнительных толкателей приводит к большему начальному растяжению троса системы обезвешивания. До начала движения отсека трос будет растягиваться весом противовеса 13 и усилием дополнительных толкателей 12. Необходимо проанализировать влияние троса на движение отсека и сравнить это движение с движением в условиях полета.
Для решения это задачи можно использовать среду SimInTech, которая имеет уже готовые блоки библиотеки “Механика” для описания исследуемой системы.
Модель в SimInTech
Построим упрощенную модель экспериментальной установки, позволяющую проанализировать поступательное движение отсека. Будем учитывать только упругие свойства троса, пренебрегая влиянием на движение отсека его массы. При построении модели также не будет учитываться сопротивление троса при взаимодействии с блоками подвески и влияние самих блоков на движение системы (сопротивление при вращении блоков, их инерционно-массовые характеристики).
В условиях наземной отработки скорость отсека относительно неподвижного макета орбитального блока после окончания работы толкателей отделения будет определяться массой отсека (\(m_A\)) и работой толкателей (обозначим скорость отсека как \(V_A\)): \[V_A = \sqrt{\frac{2A}{m_A}}\]
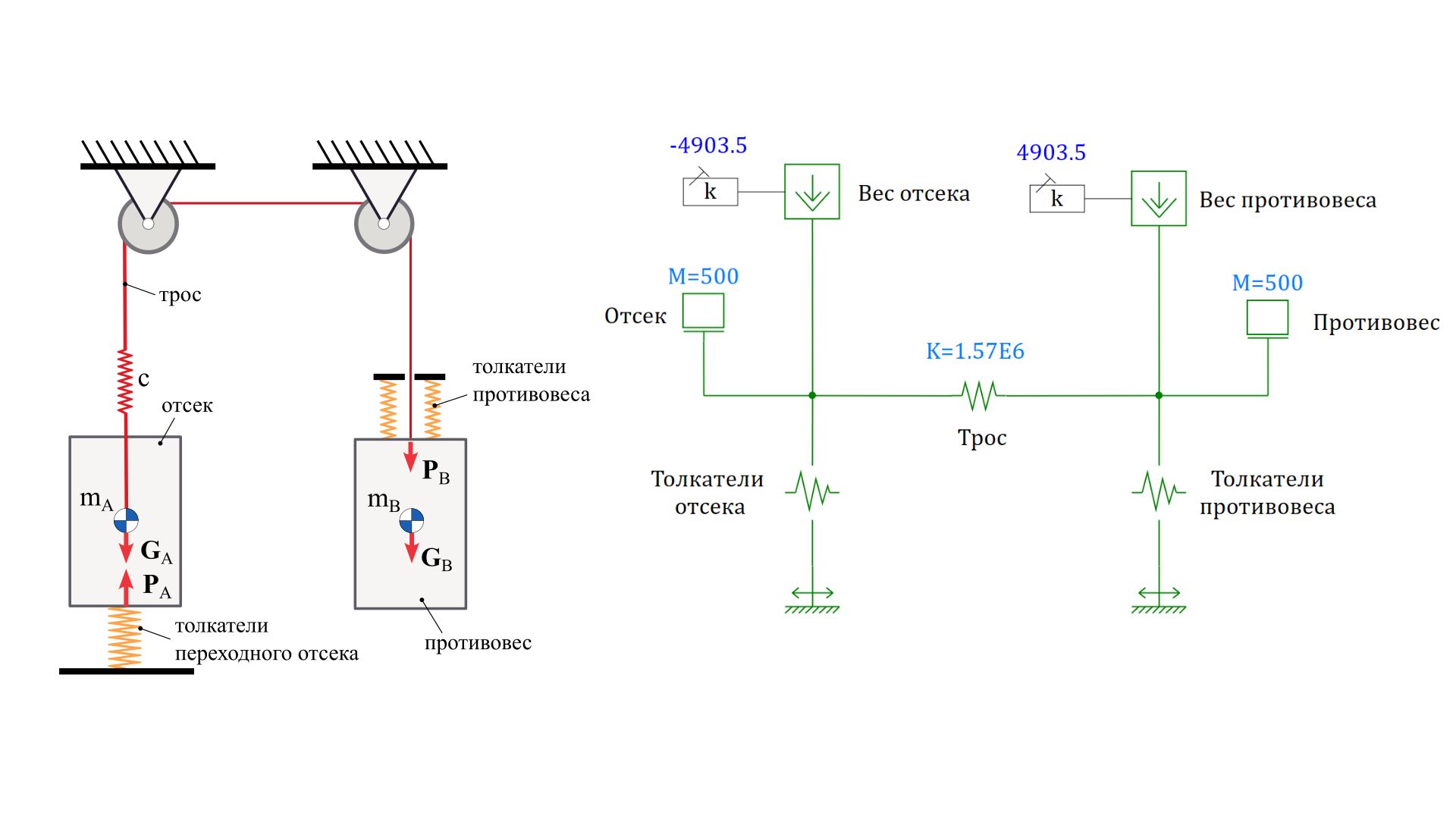
Расчётная схема модели приведена на рисунке 4. Справа на рисунке 4 показана эквивалентная схема экспериментальной с учётом принятых допущений. Трос растягивается силами веса отсека (\(G_A\)) и балансировочного груза (\(G_B\)), на отсек действует сила толкателей \(P_A\), на противовес – сила дополнительных толкателей (\(P_B\)).

Рисунок 4 - Схема модели
Схема SimInTech модели показана на рисунке 5 (следует отметить, что по структуре модель подобна модели вращающейся тросовой системы). Для сравнения движения отсека в условиях полета и в условиях наземной отработки построены две модели: слева показана модель движения отсека в условиях полета, справа – в условиях наземной отработки. По количеству блоков модель движения отсека в условиях наземной экспериментальной установки в три раза больше.

Рисунок 5 - Схема модели в среде SimInTech
Отсек и противовес представлены в виде материальных точек одинаковой массы. В SimInTech эти тела моделируются при помощи блоков “Масса” библиотеки “Механика”. Силы веса, действующие на отсек и противовес, представлены в виде блоков “Источник силы” подраздела “Механические источники”. Силы веса действуют в противоположные стороны (имеют разные знаки), растягивая трос, соединяющий отсек с противовесом.
Толкатель моделируется при помощи блока Нелинейная пружина”. В блоке в табличном виде задается закон изменения суммарной силы толкателей отсека от деформации пружины. При отрицательной деформации (пружина сжата), равной ходу толкателя, сила пружины равна суммарному начальному усилию толкателей $P_0$, при нулевой деформации сила равна конечному усилию толкателей \(P_K\), при дальнейшем увеличении деформации сила пружины равна нулю (рисунок 6). Работа толкателей для примера подобрана так, чтобы после окончания их работы переходный отсек двигался со скоростью 1 м/с.

Рисунок 6 - Свойства блока “Нелинейная пружина” (модель толкателей отделения переходного отсека)
В новой версии библиотеки “Механика” начальная деформация нелинейной пружины определяется начальным положением тела (“Масса”), поэтому, в параметрах массы, моделирующей отсек, необходимо указать начальное положение (рисунок 7).

Рисунок 7 - Параметры блока “Масса”, моделирующего переходный отсек
Трос моделируется при помощи блока “Поступательная пружина”. В отличие от Нелинейной пружины, начальная деформация (“Начальное растяжение”) линейной пружины определяется в самом блоке (не вполне понятен различный подход разработчиков к способу определения начальной деформации пружин).

Рисунок 8 - Свойства блока “Поступательная пружина” (модель троса)
До начала движения трос растянут силой веса переходного отсека и начальным усилием дополнительных толкателей. В этот момент стык переходного отсека с орбитальным блоком еще не раскрылся и удерживается замками, поэтому толкатели отделения отсека не растягивают троса. Предполагается, что в системе обезвешивания используется многожильный трос, эквивалентный по жесткости сплошному стальному тросу диаметром 10 мм и длиной 10 метров – 261.8 кН/м.
Дополнительные толкатели также моделируется при помощи блока “Нелинейная пружина”. Все параметры модели определяются в скрипте инициализации модели:
initialization
// Модуль упругости троса
YM = 200e9;
// Диаметр троса
tether_d = 0.010;
// Длина троса
tether_l = 10;
// Площадь поперечного сечения троса
tether_A = tether_d*tether_d*pi/4;
// Жесткость троса
tether_c = YM*tether_A/tether_l;
// Масса переходного отсека
O_mass = 500;
// Масса противовеса
B_mass = 500;
// Ускорение силы тяжести
g = 9.807;
// Начальное усилие толкателей (суммарное)
P0 = 1800;
// Конечное усилие толкателей (суммарное)
PK = 700;
// Ход толкателей
P_stroke = 0.2;
end
Результаты моделирования
На рисунке 9 показаны графики изменения скорости отсека в условиях полета и в условиях наземной экспериментальной установки без задействования дополнительных толкателей противовеса. В этом случае скорость отсека в условиях наземной отработки в $\sqrt{2}$ меньше скорости отсека в условиях полёта.

Рисунок 9 - Скорость отделяемого отсека в условиях полета и в условиях наземной отработки (без учёта действия толкателей противовеса)
На рисунке 10 показаны графики изменения скорости отсека в условиях полета и в условиях наземной экспериментальной установки при задействовании дополнительных толкателей. Рисунок иллюстрирует заметное влияние упругих свойств троса на скорость отсека: амплитуда колебаний скорости отсека после окончания работы толкателей составляет около 0,05 м/с (5 % от конечной скорости отсека). Результаты моделирования также показывают, что в течение 0,04 с после разделения стыка переходный отсек в условиях испытаний движется быстрее чем в реальных условиях за счёт начального растяжения троса, вызванного действием дополнительных толкателей противовеса.

Рисунок 10 - Скорость отделяемого отсека в условиях полета и в условиях наземной отработки (с учётом действия толкателей противовеса)
На рисунке 11 показан график изменения силы толкателей, действующей на переходный отсек. Продолжительность работы толкателей переходного отсека составляет около 0.35 с.

Рисунок 11 - Суммарная сила толкателей, действующая на переходный отсек
Построенная простейшая модель движения отделяемого переходного отсека в условиях наземной экспериментальной отработки позволяет оценить влияние упругих свойств троса на движение отсека.
