Вращающаяся тросовая система
Рассматривается движение вращающейся космической тросовой системы, образованной космическим буксиром и объектом космического мусора, соединённых тросом. Вращающаяся космическая тросовая система может использоваться для увода объекта космического мусора на орбиту утилизации по толкающей схеме, при которой тяга буксира действуют вдоль линии троса в направлении его сжатия. Натяжение троса обеспечивается вращением системы.
Уравнения продольных колебаний троса
Построим модель продольных колебаний троса вращающейся тросовой системы. Космический буксир и объект космического мусора рассматриваются как материальные точки постоянного состава, соединенные упругим невесомым тросом. Движение системы рассматривается в безгравитационным пространстве.
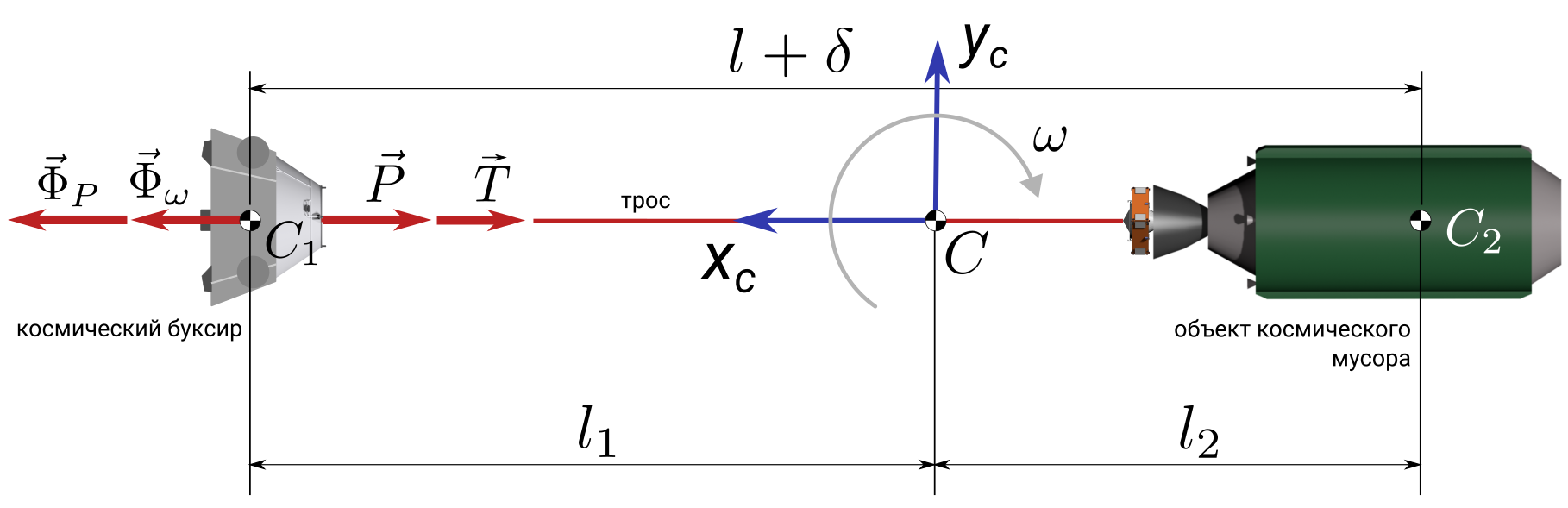
Рассмотрим движение буксира относительно неинерциальной системы координат \(Cx_cy_c\), расположенной в центре масс системы двух тел (точка C), и вращающейся в месте с тросом. \[m_1{\ddot{l}}_1=-T-P+\Phi_\omega+\Phi_p\]
В правой части уравнения указаны сила натяжения троса \(T\), тяга буксира \(P\) и две силы инерции, вызванные движением центра масс системы с ускорением (\(\Phi_p\)) и вращением троса (\(\Phi_\omega\)). Сила натяжения троса \(T\) зависит от жесткости троса (\(c=EA/l_0\)) и демпфирующих свойств троса. Предполагаем, что сила натяжения троса пропорциональна деформации \(\delta=l-l_0\) и скорости деформации \(\dot{\delta}=\dot{l}\) \[T=c\delta+k_d\ \dot{l}\]
где \(E\) - модуль Юнга материала троса, \(A\) - площадь поперечного сечения троса, \(k_d\) - коэффициент демпфирования. \[\Phi_\omega=\omega^2 l_1 m_1, \quad \Phi_p=\frac{P}{m_1+m_2}m_1\]
Расстояние от центра масс системы до буксира может быть выражено через длину троса: \[l_1=\frac{m_2}{m_1+m_2} (l_0+\delta)\]
Подставляя выражения для сил и расстояния \(l_1\) в уравнение движения, получим: \[\ddot{\delta}=-\frac{EA}{l_0 m_{12}}\delta-\frac{k_d}{m_{12}} \dot{\delta}+\omega^2(l_0+\delta)-\frac{P}{m_1}\]
где \(m_{12}\) приведенная масса системы \[m_{12}=\frac{m_1m_2}{m_1+m_2}\]
Введем обозначение для квадрата собственной частоты продольных колебаний троса: \[k^2=\frac{EA}{m_{12}l_0},\]
и коэффициента демпфирования \[\eta=\frac{k_d}{m_{12}}\]
Представим деформацию троса \(\delta\) как произведение удельной деформации \(\varepsilon\) и свободной длины троса \(\delta=\varepsilon l_0\). Уравнение продольных колебаний троса принимает вид: \[\ddot{\varepsilon}+k^2\varepsilon+2\eta\ \dot{\varepsilon}=\omega^2\left(1+\varepsilon\right)-\frac{P}{m_1l_0}\]
Это уравнение является нелинейным вследствие зависимости \(\omega\) от деформации троса. Уравнение имеет стационарное решение (\(\dot \varepsilon = \dot\varepsilon = 0\)) \[\varepsilon_s=\frac{\omega_s^2-\frac{P}{m_1l_0}}{k^2-\omega_s^2}\]
из которого можно получить стационарную деформацию троса \(\varepsilon_s\) для заданной стационарной угловой скорости \(\omega_s\). Для выполнения условия \(\varepsilon_s>0\) верхнее значение тяги буксира должно быть ограничено: \[P<\omega_s^2 m_1 l_0, \quad \omega_s>\sqrt{\frac{P}{m_1l_0}}\]
Это выражение может быть использовано для получения минимальной угловой скорости вращающейся тросовой системы для заданной тяги буксира.
Для вращающейся тросовой системы в отсутствие внешних моментов сохраняется кинетический момент относительно её центра масс: \[K_r=(l_1^2m_1+l_2^2m_2), \quad \omega=m_{12}l^2\omega=\text{const}\]
Предположим, что в момент формирования вращающейся тросовой системы длина троса была равна его свободной длине \(l_0\). В этом случае начальная угловая скорость системы будет определяться выражением \[\omega=\frac{l_0^2}{l^2}\omega_0=\frac{1}{(1+\varepsilon)^2}\omega_0\]
Подставляя это выражение для угловой скорости в дифференциальное уравнение движения, получим: \[\ddot{\varepsilon}+k^2\varepsilon+2\eta\ \dot{\varepsilon}=\frac{\omega_0^2}{\left(1+\varepsilon\right)^3}-\frac{P}{m_1l_0}\]
Для \(\varepsilon \ll 1\) можно линеаризовать первое слагаемое в правой части \[\frac{1}{(1+\varepsilon)^3}\approx1-3\varepsilon\]
и привести уравнение движения к линейному неоднородному дифференциальному уравнению: \[\ddot{\varepsilon}+\left(k^2+3\omega_0^2\right)\varepsilon+2\eta\dot{\varepsilon}=\omega_0^2-\frac{P}{m_1l_0}\]
Решение этого уравнения при \(P = 0\) и при отсутствии демпфирования с начальными условиями \[\varepsilon(0)=0, \quad \dot{\varepsilon}(0) = \dot{\varepsilon}_0\]
имеет вид: \[\varepsilon=\varepsilon_s \left(1-\cos \frac{\omega_0}{\sqrt{\varepsilon_s}} t \right)+\frac{\dot{\varepsilon}_0}{\omega_0} \sqrt{\varepsilon_s} \sin \frac{\omega_0}{\sqrt{\varepsilon_s}} t\]
где деформация \(\varepsilon_s\) определяется стационарным решением: \[\varepsilon_s = \frac{\omega_0^2}{k^2+3\omega_0^2}\]
Задание
- Определить минимальный диаметр троса, обеспечивающий его прочность с запасом 1,5.
- Найти максимальную деформацию и максимальную силу натяжения троса.
- Определить период продольных колебаний троса.
- Сравнить аналитическое решение линейной системы с численным решением нелинейной системы: определить абсолютную погрешность определения максимальной деформации троса в метрах, сравнив решения линейной и нелинейной систем.
Исходные данные
Вариант 1
| Параметр | Обозначение | Значение |
|---|---|---|
| Масса буксира | \(m_1\) | 1000 кг |
| Масса объекта космического мусора | \(m_2\) | 4000 кг |
| Модуль упругости материала троса | \(E\) | 83 ГПа |
| Диаметр троса | \(d\) | ? мм |
| Свободная длина нерастянутого троса | \(l_0\) | 3000 м |
| Начальная угловая скорость системы | \(\omega_0\) | 3 \(^o/c\) |
| Начальная скорость растяжения троса | \(\dot{\delta}_0\) | 5 м/c |
Вариант 2
| Параметр | Обозначение | Значение |
|---|---|---|
| Масса буксира | \(m_1\) | 2000 кг |
| Масса объекта космического мусора | \(m_2\) | 3000 кг |
| Модуль упругости материала троса | \(E\) | 83 ГПа |
| Диаметр троса | \(d\) | ? мм |
| Свободная длина нерастянутого троса | \(l_0\) | 3000 м |
| Начальная угловая скорость системы | \(\omega_0\) | 2 \(^o/c\) |
| Начальная скорость растяжения троса | \(\dot{\delta}_0\) | 2 м/c |
Вариант 3
| Параметр | Обозначение | Значение |
|---|---|---|
| Масса буксира | \(m_1\) | 1000 кг |
| Масса объекта космического мусора | \(m_2\) | 4000 кг |
| Модуль упругости материала троса | \(E\) | 90 ГПа |
| Диаметр троса | \(d\) | ? мм |
| Свободная длина нерастянутого троса | \(l_0\) | 4000 м |
| Начальная угловая скорость системы | \(\omega_0\) | 1 \(^o/c\) |
| Начальная скорость растяжения троса | \(\dot{\delta}_0\) | 0 м/c |
Вариант 4
| Параметр | Обозначение | Значение |
|---|---|---|
| Масса буксира | \(m_1\) | 2000 кг |
| Масса объекта космического мусора | \(m_2\) | 5000 кг |
| Модуль упругости материала троса | \(E\) | 83 ГПа |
| Диаметр троса | \(d\) | ? мм |
| Свободная длина нерастянутого троса | \(l_0\) | 3000 м |
| Начальная угловая скорость системы | \(\omega_0\) | 3 \(^o/c\) |
| Начальная скорость растяжения троса | \(\dot{\delta}_0\) | 10 м/c |
Вариант 5
| Параметр | Обозначение | Значение |
|---|---|---|
| Масса буксира | \(m_1\) | 2000 кг |
| Масса объекта космического мусора | \(m_2\) | 5000 кг |
| Модуль упругости материала троса | \(E\) | 83 ГПа |
| Диаметр троса | \(d\) | ? мм |
| Свободная длина нерастянутого троса | \(l_0\) | 2000 м |
| Начальная угловая скорость системы | \(\omega_0\) | 2 \(^o/c\) |
| Начальная скорость растяжения троса | \(\dot{\delta}_0\) | 10 м/c |
Вариант 6
| Параметр | Обозначение | Значение |
|---|---|---|
| Масса буксира | \(m_1\) | 500 кг |
| Масса объекта космического мусора | \(m_2\) | 2000 кг |
| Модуль упругости материала троса | \(E\) | 120 ГПа |
| Диаметр троса | \(d\) | ? мм |
| Свободная длина нерастянутого троса | \(l_0\) | 1000 м |
| Начальная угловая скорость системы | \(\omega_0\) | 3 \(^o/c\) |
| Начальная скорость растяжения троса | \(\dot{\delta}_0\) | 5 м/c |
Вариант 7
| Параметр | Обозначение | Значение |
|---|---|---|
| Масса буксира | \(m_1\) | 1000 кг |
| Масса объекта космического мусора | \(m_2\) | 3000 кг |
| Модуль упругости материала троса | \(E\) | 100 ГПа |
| Диаметр троса | \(d\) | ? мм |
| Свободная длина нерастянутого троса | \(l_0\) | 1500 м |
| Начальная угловая скорость системы | \(\omega_0\) | 3 \(^o/c\) |
| Начальная скорость растяжения троса | \(\dot{\delta}_0\) | 5 м/c |

